
|
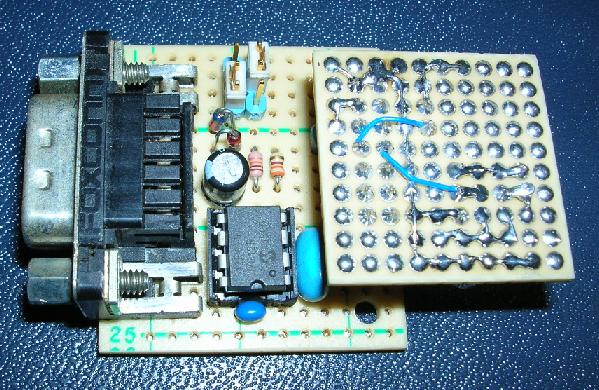
�� PS/2 Mouse to SUN Mouse Converter �� PS/2 �}�E�X�� SUN �̃}�E�X�ɕϊ��������u�ASUN 4 Solaris/OpenBSD �Ŏg�p���B CPU �� PIC12C509 ���g�p�A��H�} ���̃W�����p�[�̓V���[�g��2�{�^���}�E�X�� 3�{�^���}�E�X�ɃG�~�����[�V�������܂��B�i���E���������ŃZ���^�[�{�^���j �X�N���[���}�E�X(�R���R���}�E�X)�̂�������2�{�^���Ƃ��Ă����F�����܂���B ���̏ꍇ���W�����p�[���V���[�g����3�{�^���G�~�����[�V�����Ŏg�p���܂��B pic circuit pinouts ps2sunm.hex top |
|
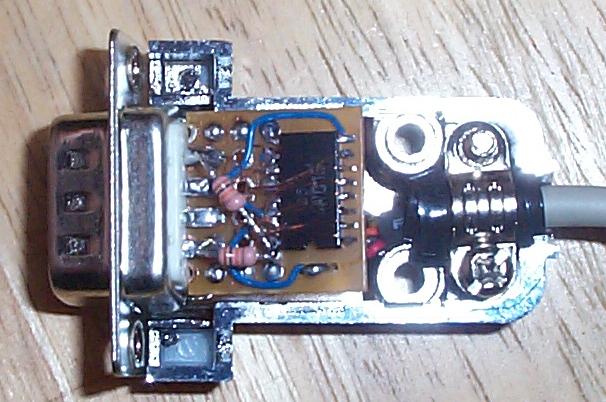
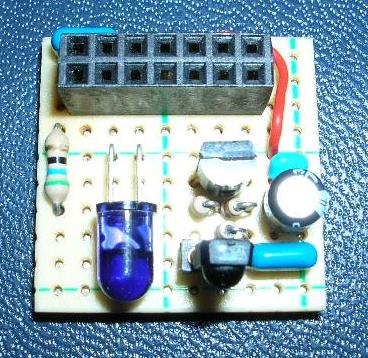
�� JoyPad PS/2 Mouse �� JoyPad �^ PS/2 �}�E�X�ł��B CPU �� PIC12C509 (���� CR ���U���[�h) circuit1 �� JoyPad �g���^�̉�H�Acicuit2 �� JoyPad �A�_�v�^�[�^�̉�H �ǂ�������� hex �t�@�C���œ��삵�܂��B pic circuit1 circuit2 pinouts padps2m.hex top |
|
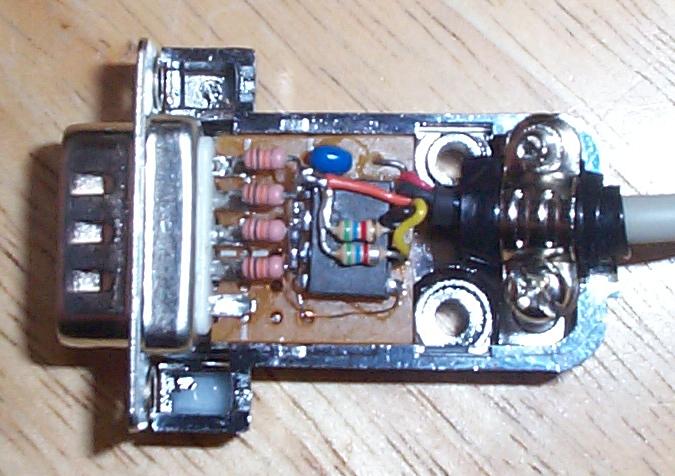
�� JoyPad PS/2 Wheel Mouse �� �@�z�C�[���@�\�t JoyPad �^ PS/2 �}�E�X�ł��B CPU �� PIC12F629 (���� CR ���U���[�h)�@ (���[�NRAM �ƃv���O�����R�[�h�̐������������Ȃ��ė����̂� PIC12F629 ���g�p) ��H�͏�L JoyPad �^ PS/2 �}�E�X�Ɠ����� Wheel Mode Switch ��lj����܂��B (�g���^ �� �A�_�v�^�[�^ �� Wheel Mode Switch �̕t��������قȂ�܂��B) ����̓X�N���[�����L���ȃE�C���h�E��� Wheel Mode Switch �������Ă���� �J�[�\���㉺����Ńz�C�[������ɂȂ�A�����Βʏ�̃}�E�X�J�[�\���ړ��ɂȂ�܂��B �Z���^�[�{�^���͍��E�̃g���K�[�{�^�����ɉ������ƂŃG�~�����[�V�������܂��B (�ʐ^�� Wheel Mode Switch �͎����I�ȉ��~�ߏ�Ԃł����A���̕ӂ�Ɏ��t���� �l�����w�ő��삷��Ƌ���ǂ��悤�ł��B) (���̌��A�������̒����^�N�g�X�C�b�`�� JoyPad �Ɍ��������Ď��� �A�_�v�^�[�^�̉�H�� DSUB-9pin �̃n�E�W���O�ɓ���Ă݂܂��� pic1 pic2 pic3) circuit1 �� JoyPad �g���^�̉�H�Acicuit2 �� JoyPad �A�_�v�^�[�^�̉�H �ǂ�������� hex �t�@�C���œ��삵�܂��B pic circuit1 circuit2 pinouts padps2wm.hex top |
|
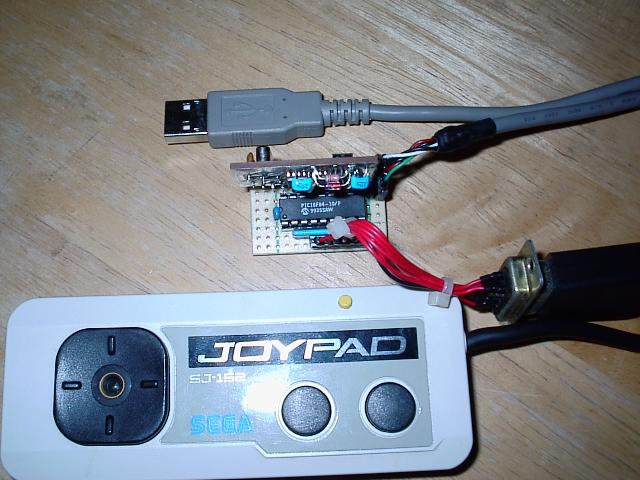
�� JoyPad USB Wheel Mouse �� �z�C�[���@�\�t JoyPad �^ USB �}�E�X�ł��B CPU �� PIC12F629 (���� CR ���U���[�h) ����͏�L JoyPad PS/2 Wheel Mouse �Ɠ����ł��B USB �R���g���[���ɂ͈ȑO�� ���j�b�g�� ���� USBN9603 ���g�p���Ă��܂��B ���F��H�}���� USB 4pin Header �̓{�[�h���ň������C�A�E�g�� ���ۂ� USB �s���z�u�Ƃ͈قȂ�܂��B pic circuit1 circuit2 padusbwm.hex top |
|
�� JoyPad SUN Mouse �� JoyPad �^ SUN�p �}�E�X�ł��B CPU �� PIC12C509 (���� CR ���U���[�h) �Z���^�[�{�^���̓g���K�[�{�^��2���������őΉ��B circuit1 �� JoyPad �g���^�̉�H�Acicuit2 �� JoyPad �A�_�v�^�[�^�̉�H �ǂ�������� hex �t�@�C���œ��삵�܂��B ��) ���� CR ���U 4MHz ���� 1200BPS �V���A���M������邽�ߌ̍��ɂ���Ă� �듮�삷�邩������܂���B�茳��3��CPU�ł͖�薳�����삵�Ă��܂��B circuit1 circuit2 pinouts padsunm.hex top |
|
�� PS/2 DEBUG CIRCUIT �� ����� PS/2 ���̃f�o�b�O�p�ɍ��������ł��B �t���\��/JoyPad�̃L�[�X�L����/�~�j�X�s�[�J�[�ɂ��BEEP���ׂ̈� �V�t�g���W�X�^�[���g���� 8pin PIC �̏��Ȃ� I/O �����Ă��܂��B �f�o�b�O���� CPU �� PIC12F629 ���g�p���Ă��܂��B �ʐ^�ł͌����Č����炢�ł����t���\���ɕ\�����ꂽHEX������� PS/2���������Ă���v���O���}�[�Ȃ�Ӗ���������Ǝv���܂��B (�z�X�g�� FMV-5233NU/W �m�[�g�A�z�b�g�v���O�Ń}�E�X(ID 0x00) �Ƃ��ĔF�� ��������Ԃł��B�ȍ~ 0x10 ����1�b�����ɑ����Ă��܂��B(�쎞)) pic circuit top |
|
�� Universal Timer Controller �� �ėp�^�C�}�[�R���g���[�� PIC12F629 �g�p�B(���� CR ���M���[�h) ���C�̊��C��p�ɍ�������ł����l��ύX����Ε��P�ʂōő� 256�� X 3 ���݂� HEX�t�@�C�� �̐ݒ�l�ł͍ő�3���� (60�� X 3) �ɂȂ�܂��B ����̓X�C�b�`�������ƍő厞�ԂŃ^�C�}�[���X�^�[�g���܂��B �L�[�������Ă��� 3�b�ȓ��ɂ���ɃL�[�������Ă�����3�i�K�̃^�C�}�[�ݒ��OFF��Ԃ��J��Ԃ��܂��B �ݒ�� 3�b�o�߂���Ɠ_�ł��n�܂�ݒ胂�[�h����^�]���[�h�ɂȂ�܂��B �^�]���[�h (�_�ŏ��) ���ɃL�[�������ƃ^�C�}�[���I����OFF��ԂɂȂ�܂��B �^�C�}�[�̎��Ԃ�ύX�������ꍇ�̓v���O�����R�[�h�� 1 ���� 3�Ԓn�� RETLW �l�� �ύX���܂��B (���ݒl�͂��ꂼ�� RETLW 60 (343CH)�A���Ƃ������ RETLW 1 (3401H) �ɕύX����� 3���^�C�}�[�ɂȂ�܂��B) 1 ���� 3�Ԓn�̃v���O�����R�[�h�� LED1 ���� LED3 �̃^�C�}�[�l�ɑΉ����܂��B ���Ԃ̌덷���傫���ꍇ�̓L�[�������Ȃ���d���𓊓������ LED1�[�q�� 4MHz�� 1/32 (125KHz) ���o�͂���̂� 3FFH �Ԓn�̕�l������ 125KHz �ɋ߂��Ȃ� �悤�ɏC�����Ă��������B(��l��1�X�e�b�v 1KHz �ʕω����܂��B �傫������� ���g���͍����Ȃ菬��������ΒႭ�Ȃ�܂��B�A������ CR ���M�̎��g���͉��x�� �d���d���ɉe������₷���̂Œ����ԃ^�C�}�[�قnj덷�͑傫���Ȃ�܂��B) ���F�e�X�g�N���b�N�̓L�[�������Ă���Ԃ̂ݏo�͂��ꗣ���ƒʏ퓮��ɂȂ�܂��B ��H�}�� �� LED1 ���� LED3 ���e�^�C�}�[��ԕ\���p�� LED4 �͌u�X�C�b�` �̂悤�ȃX�C�b�`���ɕt����LED�����v�p (�펞�_��) �ł��B(���Ȃ݂� LED1 ���� LED4 �͏���d����}���邽�߃_�C�i�~�b�N�_�������Ă��܂��B) pic circuit timer.hex top |
|
�� 'SAIKORO' (Dice) �� �d�q�T�C�R�� PIC12F629 �g�p�B(���� CR ���M���[�h) ���̖��̒ʂ�T�C�R���ł��A�������̃e�[�u���Q�[���p�ɍ���Ă݂܂����B ��H�}���̍���3��LED�Ǝc��4��LED�͋ɐ����t�ɂȂ��Ă���̂Œ��ӁB (LED�_�C�i�~�b�N�_����H�̕��i�_�������炷�ׂ̍H�v�ł��B) pic circuit saikoro.hex top |
|
�� RS-232C to IrDA Converter II �� �ԊO�҂� RS-232C to IrDA Converter �� 8pin PIC ���u�����������ł��BPIC12F629 �g�p�B �ʐM�X�s�[�h�� 9600bps �Œ� (8N1)�ACPU ��ύX���������Ȃ̂ŏڍׂ� �������B �H���� IrDA �ԊO���ʐM���W���[�� ���g�����ꍇ�� ��H�B pic1 pic2 pic3 circuit circuit2 rs2ir2.hex top |
|
�� 4CH Digital Volt Meter (IrDA/RS-232C) �� A/D ���ڂ� PIC12F675 ���g�p���� 4 �`�����l���ȈՃf�W�^���{���g���[�^�[ �ł��B ����͈͂� 0 - 20.46V �� 20mV �X�e�b�v�̐��x�A��������͖� 140mSEC �ł��B �d���\���� IrDA �� RS-232C �ʐM�Ńz�X�g���̃^�[�~�i���\�t�g���ŕ\�������܂��B (IrDA �� RS-232C �̑I���� ��H�}�� �� JP1 �œ��쒆���ύX�\) �����͍Z�����ꂽ�f�W�{�����œd���l�������悤�Ɋe�`�����l���̃{�����[���� �������邾���ł��B�A�� �ʐ^ �ɂ���悤�ȑ���]�{�����[���������ꍇ�́A���� �d���� 1/4 �ɕ������镔�����Œ��R�Ɣ��Œ��R�̑g�ݍ��킹�ɂ��Ȃ��� �������V�r�A�ɂȂ�܂��B �ʐM�X�s�[�h��r�b�g���� IrDA / RS-232C ���� 9600BPS 8N1 �Œ�ł��B �i���Ȃ݂� IrDA ���̃p���X���� 2uSEC �ł��B�j pic circuit voltir.hex top |
|
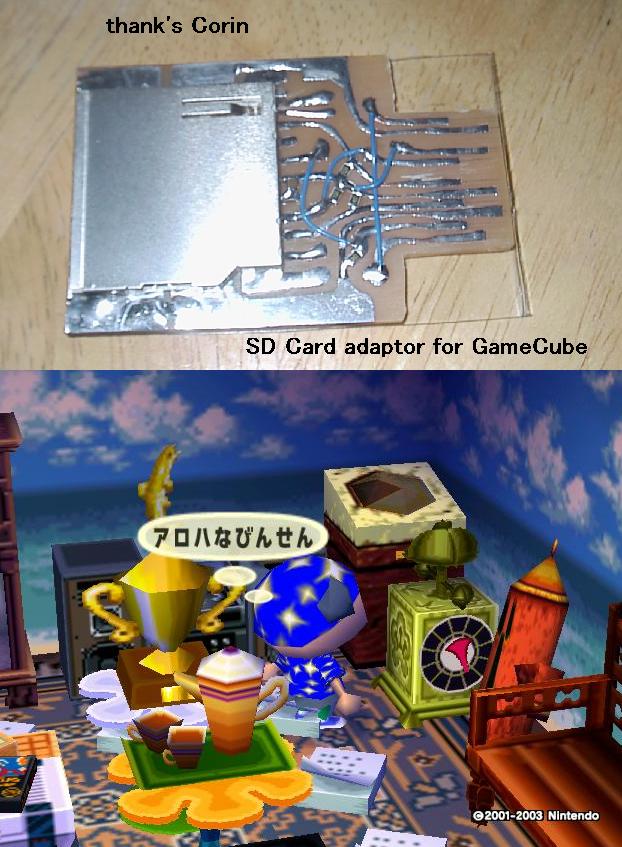
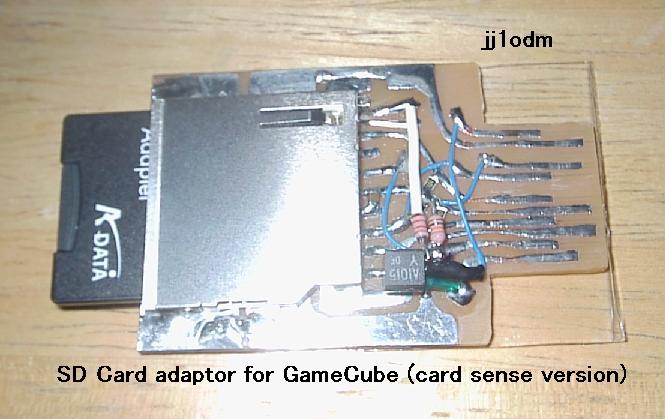
�� SD Card adaptor for GameCube �� �Q�[���L���[�u�� SD �J�[�h�A�_�v�^�[������Ă݂܂����B �����}�� corin ���� �y�[�W�� �Q�l�ɂ��܂����B �ŏ��� ������� �͒ʏ�̃������J�[�h���l�ɃJ�[�h�G�b�W�R�l�N�^ 1pin 12pin �� �V���[�g���������̃J�[�h�S�̂̔���������z�肵�� �\�� �ł��B���̂܂܂ł����� ��肠��܂��ASD �J�[�h�\�P�b�g�ɂ���J�[�h���o�[�q�𗘗p���� SD �J�[�h�� ���������Ń������J�[�h�̃Z���X�[�q���R���g���[������悤�ɂ��܂����B �ڂ������ׂĂ��܂��J�[�h�G�b�W�R�l�N�^ 12pin �ɂ� 3.3V �����̂܂ܗ��Ă��� �����œ��쒆�ω����Ȃ��悤�ł��B�����悤 ��H�} �ł� 12pin �̏�Ԃ� SD �J�[�h ���o�[�q�Ő��䂵�� �J�[�h�G�b�W�R�l�N�^ 1pin �ɏo�͂��Ă��܂��B �߂�ǂ��Ȃ�g�����W�X�^�g�킸 SD �J�[�h�\�P�b�g�̃J�[�h���o�[�q�ƃ\�P�b�g�� �t���[���O�����h�����̂܂܃X�C�b�`�Ƃ��ė��p�ł��܂��B���͊�̃p�^�[���� �����z�肵�Ă���܂������A������ƋC���������̂Ō���� ��H �ɂȂ�܂����B pic1 pic2 circuit circuit2 pic3 top |
|
|
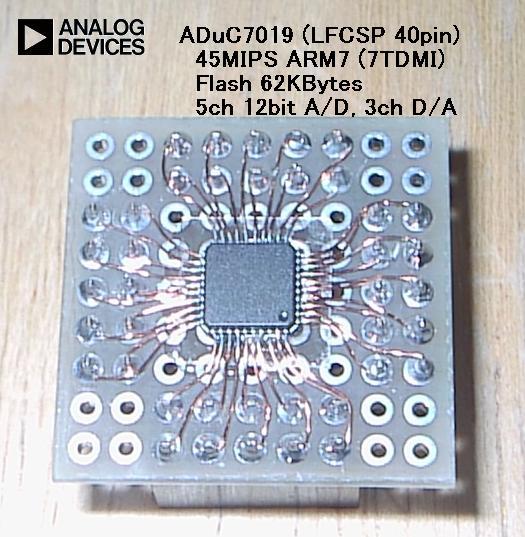
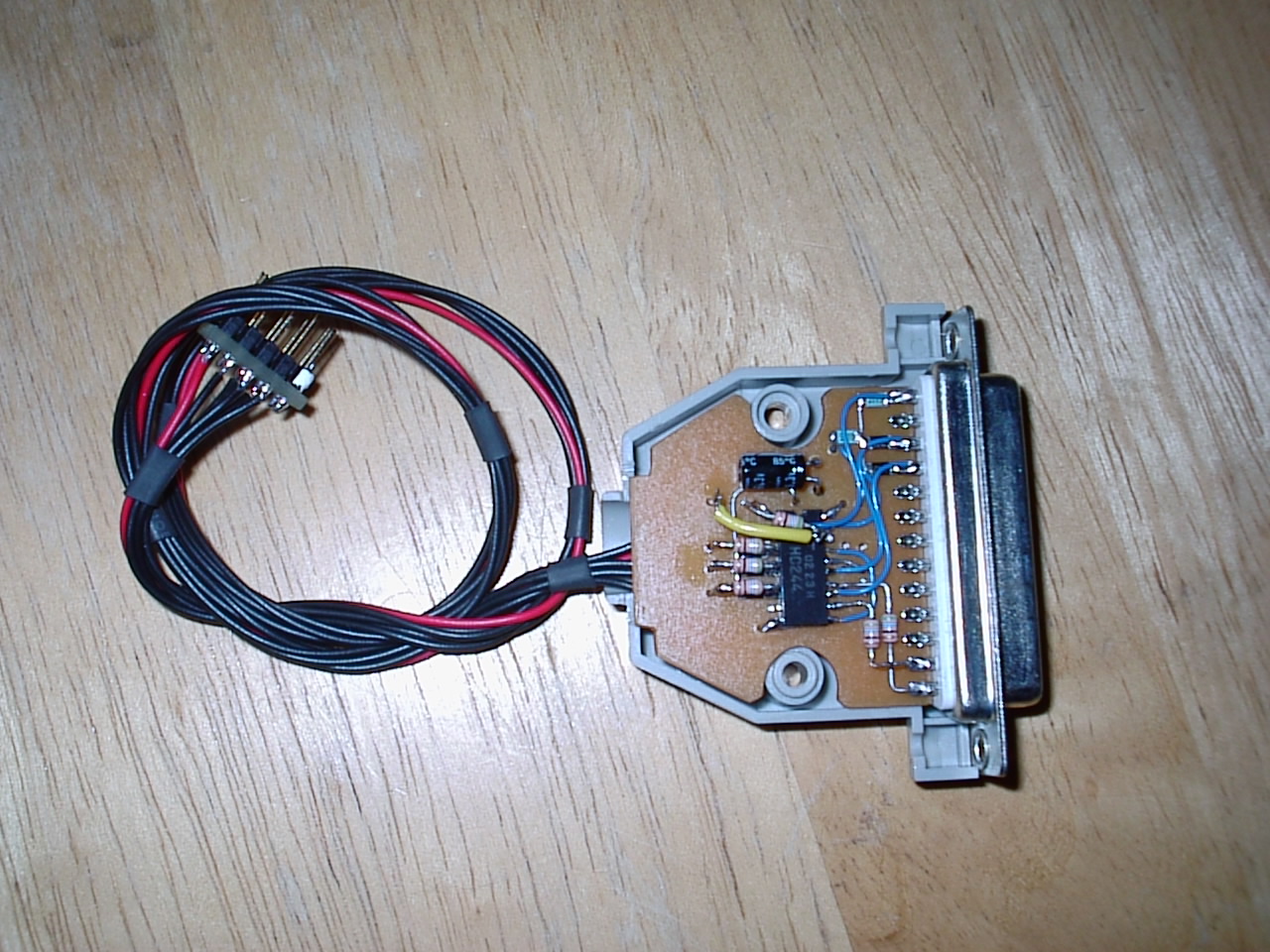
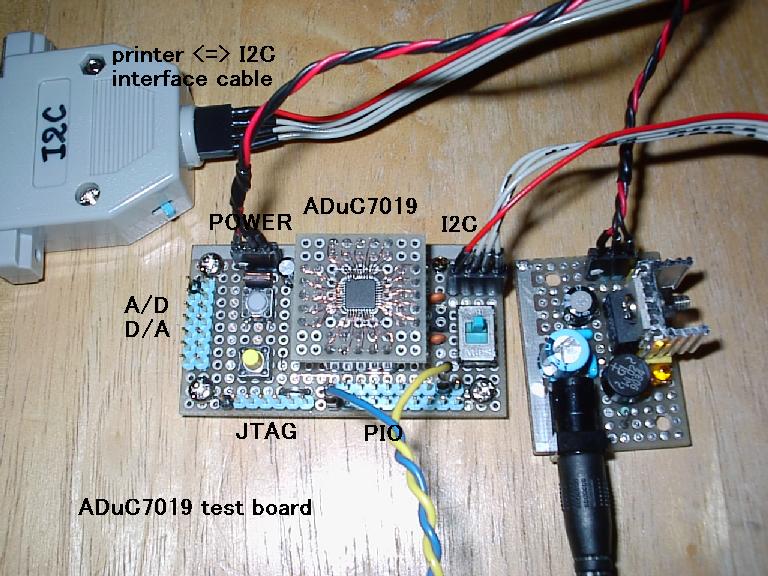
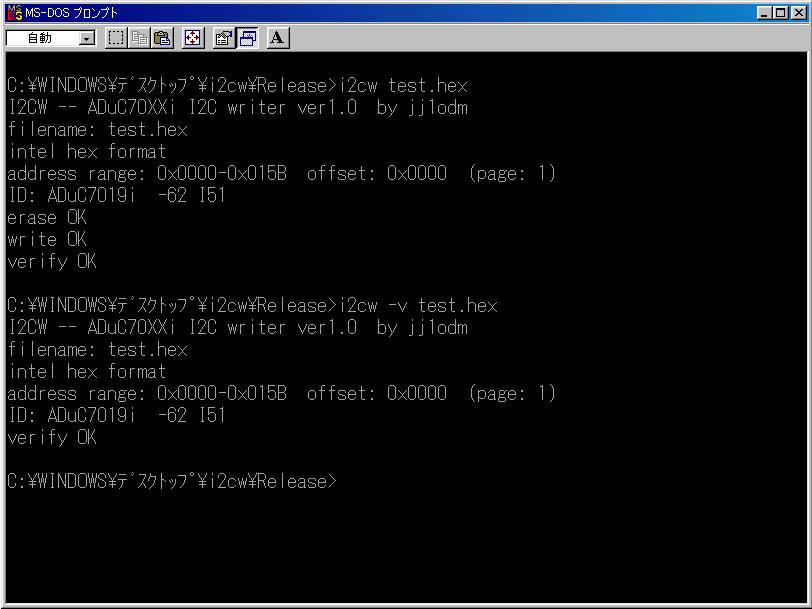
�� ADuC70xx I2C writer �� �A�i���O�f�o�C�X�Ђ� ARM micro controller ADuC70xxi �p I2C ���C�^�[�ł��B ���̓T�t�B�b�N�X�� i �̕t���f�o�C�X���V���A���_�E�����[�_�p�ł͂Ȃ� I2C �_�E�����[�_�p�ł��鎖�ɋC�����ċ}篍�������̂ł��B �i���炭 JTAG �ŏ����Ă܂������A�V���A���_�E�����[�_�̎g������ �̗ǂ����� I2C �ł����܂����B�j �I�[�_�[�K�C�h�ɂ��� I2C �_�E�����[�h���[�h�Ή��� ADuC7019/7020/7021�B ADuC7019 �� I2C �̂݁AADuC7020/7021 �͌^�Ԃɂ�� UART �� I2C �ɑΉ��B �v�����^�[�|�[�g <=> I2C �C���^�[�t�F�[�X�̃P�[�u���͐� I2C ������ �ׂ̈ɍ�����_�C�I�[�h�̂ݎg�p���� �ȈՔ� �ł�����薳���������߂܂��B �i�����悤�o�b�t�@�[ IC ���g���� ��H ������܂��B�j ���݂Ƀv�����^�[�|�[�g�̐M������d���������o����悤�ɂȂ��Ă��܂��� ����͏���d���̏����� I2C �������p�� ADuC70xxi �̏ꍇ�̓^�[�Q�b�g �̓d���ɐڑ����܂��B �g������ HEX �t�@�C�����w�肵�Ď��s���邾���ł��B i2cw file.hex HEX �t�@�C���� intel �� motorola �t�H�[�}�b�g�ɑΉ����Ă��܂��B �o�C�i���|�t�@�C���̏ꍇ�� -b �I�v�V���������܂��B �i���F�������ރR�[�h�� 0x0014 �Ԓn�̃��U�[�u�x�N�^�� I2C �_�E�����[�_ ���[�h�Ɉڍs���鎞 0xffffffff ���ǂ����`�F�b�N���Ă��܂��B���̒l������ �ȊO�̏ꍇ�_�E�����[�_���[�h�Ɉڍs�ł��܂���B���̃��C�^�[�ł͎w�肵�� �t�@�C���̓��e�Ɋւ�炸���̕������� 0xffffffff �ɏ��������Ă��܂��B ���ꂩ�瓮��s����̏ꍇ CPU �̃R�A�d���[�q�� VCC �[�q�̃p�X�R�� ���`�F�b�N���Ă��������B �NjL�FOS �� NT �n�̏ꍇ giveio.sys ���K�v�ł��B�j pic1 pic2 pic3 pic4 pic5 circuit circuit2 i2cw.lzh top |
|
|
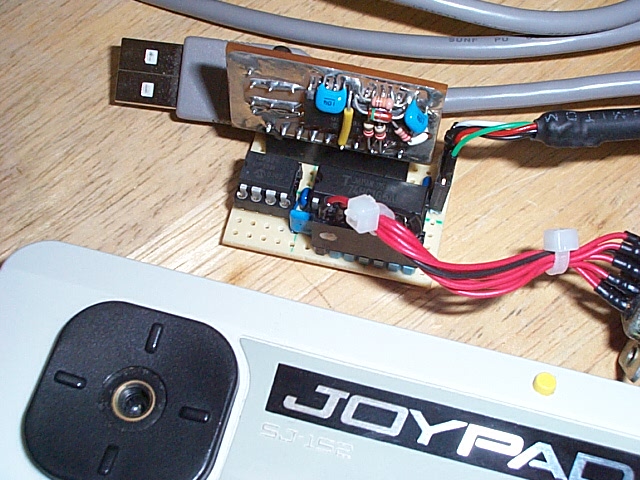
�� JoyPad USB Wheel Mouse for PIC16F84 �� PIC16F84 ���g���� �z�C�[���@�\�t�� JoyPad USB �}�E�X �ł��B ���͂��ꂪ USBN9603 ���g�����}�E�X���̎n�܂�ŁA�ŏ��ɍ�������̓o���b�N�̂܂܂� ���͖��� �ʐ^ �͍ēx��蒼�������ł��B�@�t�@�[���E�G�A�͓����������Ǝv���܂����� 1K ���[�h�ɉ��Ƃ����܂�܂����B (�������� 8pin PIC �ɒu���������̂������ł��B) pic circuit padusbwm.hex top |
|
|
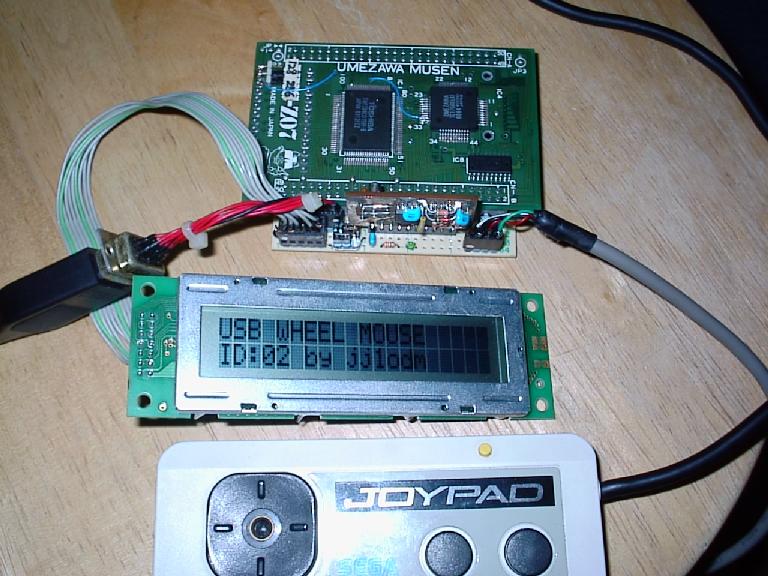
�� JoyPad USB Wheel Mouse for UEC-Z07 CPU Board �� �~�V���� �� TMPZ84C015 CPU �{�[�h UEC-Z07 ���g���� �z�C�[���@�\�t�� JoyPad USB �}�E�X �ł��B ��H �̓{�[�h�� CN-B �R�l�N�^�[���̂ݎg�p���� PORTA/PORTB �� Joypad �� SPI �C���^�[�t�F�[�X�� USBN9603 �� 4 bit BUS ���[�h�� LCD ��ڑ����Ă��܂��B �iLCD �̓f�o�b�O�p�Ń}�E�X����ɂ͊W����܂���j �ʐ^ �� CPU �{�[�h�ɃW�����p�[�����{����܂����AROM 27128/27256 �̐؊��Ɨ�RAM (32K) ���ׂ݂̈ŁA�}�E�X�̓���Ƃ͊W����܂���B �i�}�E�X�ł� ��RAM �͖��g�p�j pic1 pic2 circuit bin(rom) top |
|
|
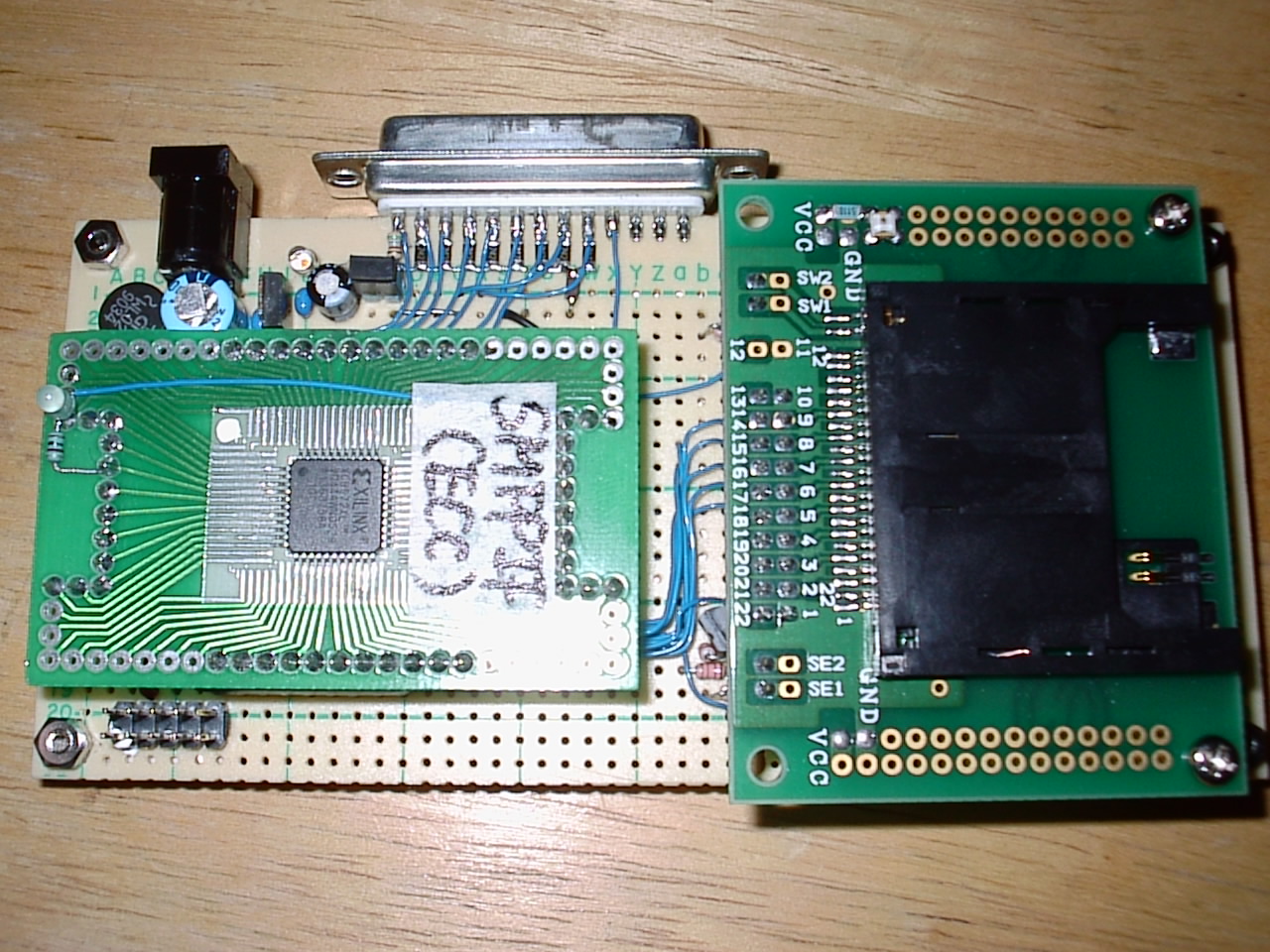
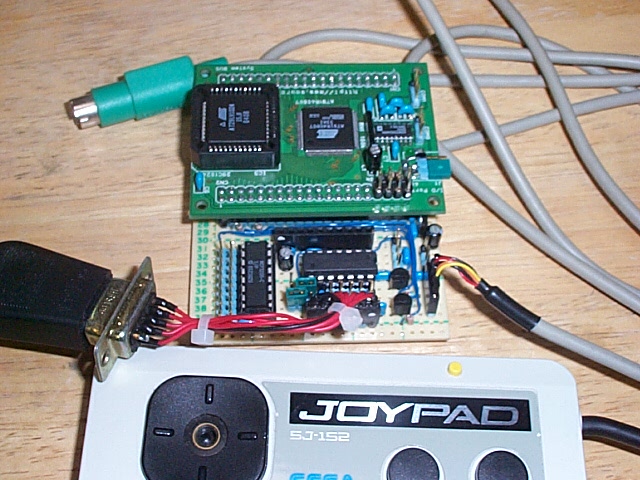
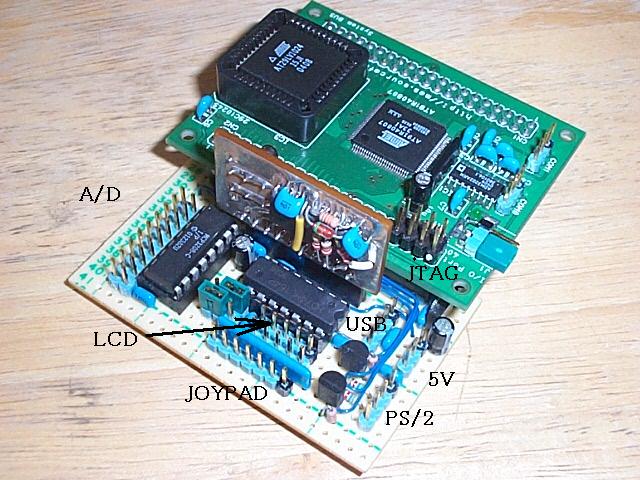
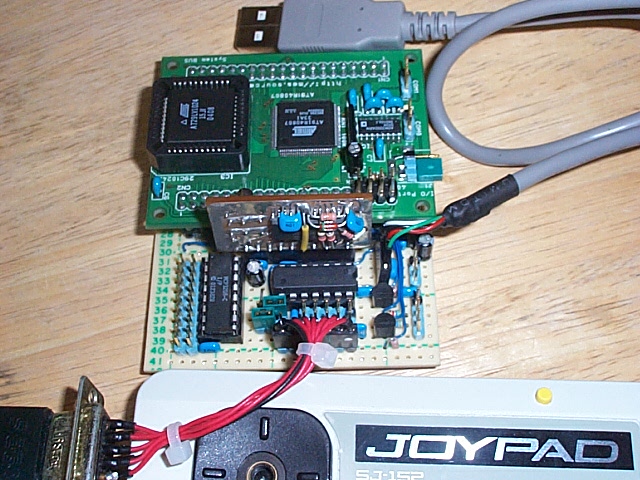
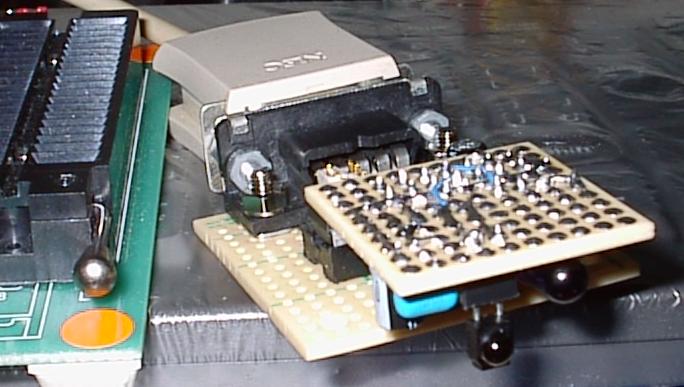
�� JoyPad PS/2 Wheel Mouse for AKI-ARM CPU Board �� �H���� ARM CPU �{�[�h���g�����z�C�[���@�\�t�� JoyPad PS/2 �}�E�X�ł��B �{���� PS/2 �L�[�{�[�h���O���ɐڑ�����ׂɕt�����|�[�g�ł����A�}�E�X�ɂ��Ă݂܂����B (����USB�R���g���[���AA/D�R���o�[�^�ALCD I/F �� SPI �C���^�[�t�F�[�X�œ���) �u�ȂЂ����v ����� ARM CPU �p JTAG �f�o�b�K���g�p���Ă��܂��B (���炵���\�t�g�Ɋ��� !!) pic1 pic2 circuit sample bin(rom) top |
|
|
�� JoyPad USB Wheel Mouse for AKI-ARM CPU Board �� USB �R���g���[���𓋍ڂ��Ă���̂��z�C�[���@�\�t�� JoyPad USB �}�E�X�ɂ��Ă݂܂����B ��H�� ��L��H �� USBN9603 �� SPI �C���^�[�t�F�[�X�Őڑ����܂��B (USBN9603 �� �ȑO SPI I/F �p�� ���j�b�g�� ���������g�p�BVCC �� 3.3V �ɐڑ�) ���F��H�}���� USB 4pin Header �̓{�[�h���ň������C�A�E�g�� ���ۂ� USB �s���z�u�Ƃ͈قȂ�܂��B pic circuit bin(rom) top |
|
|
�� JoyPad USB Wheel Mouse for AKI-H8/3664 CPU Board �� �H���� H8/3664 CPU �{�[�h���g���� �z�C�[���@�\�t�� JoyPad USB �}�E�X �ł��B ��H �͗�ɂ���� USBN9603 �� SPI �C���^�[�t�F�[�X�Őڑ����܂��B ���ۂ̃{�[�h�͑��� LCD / PS/2 / RS-232C header / �d����H�𓋍ځB (USBN9603 �� SPI I/F �p�� ���j�b�g�� ���������g�p�B�d���� USB �� 5V �ɐڑ�) pic1 pic2 circuit 3664usbmouse.mot top |
|
|
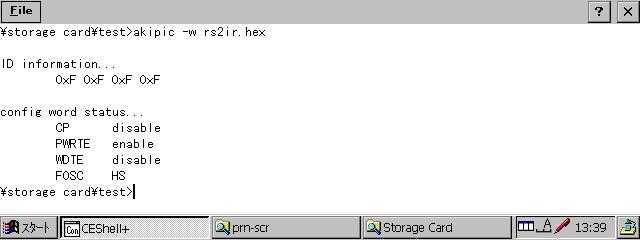
�� �y���\�i(HPW-200JC) �� PIC �J�� �� ������ WindowsCE �@ PERSONA (HPW-200JC) �� WinCE �}�V�[���Ƃ��Ă͂��Ȃ�Â� �@�B�ł����A�g��Ȃ��̂����������Ȃ��̂� PIC �J���c�[�����ڐA���Ă݂܂����B �ڐA�������� picasm �ƏH���� PIC ���C�^�[�p�� Linux/BSD �����ɏ����ꂽ ���C�^�[�\�t�g akipic �ł��B PIC/AVR/Z80 ���̑������� CPU ���T�|�[�g���� tpasm ���ڐA���܂����B �v���O���������s����ɂ́A�ɓ��h��Y����� Console (CEShell) ���K�v�ł��B picasm.exe akipic.exe �Ƃ��Ɏ��s�o�C�i�� (SH3 �p�Ńy���\�i�̂ݓ���m�F) �݂̂� �h�L�������g�͂���܂���B (�I���W�i���̃T�C�g�Ŋm�F���Ă�������) picasm: http://www.co.jyu.fi/~trossi/pic/ akipic: http://members.jcom.home.ne.jp/pnms/akipic.html �Ȃ��Aakipic �̃V���A���f�o�C�X�I���̃I�v�V�����̓f�B�t�H���g�� COM1: �Ȃ̂� ActiveSync �P�[�u���ƃN���X�P�[�u���o�R�ŏH���� PIC ���C�^�[�ɐڑ����܂��B ���Ȃ݂� COM4: IR �|�[�g�Ŏ���� RS-232C <-> IrDA �ϊ��@ ���g���ă��C�����X �ԊO���ʐM�ł����삵�Ă��܂��B�y���\�i�ł� ����i (PIC16F84 �g�p) screen1 screen2 picasm.lzh akipic.lzh tpasm.lzh top |
|
|
�� RS-232C to IrDA Converter �� �y���\�i�ƏH���� PIC���C�^�[��IrDA�ʐM�Őڑ�����ׂ�����Ă݂܂����BPIC16F84�g�p�B �ʐM�X�s�[�h�� 9600bps �Œ�A�g�����W�X�^1�̊ȒP�ȃA���v�ł����^�ԕs���� PD �i�z�g�_�C�I�[�h�j��15�Z���`���̔�������܂��B���Ȃ݂� IR �̑��M���Ŏg�p���Ă��� GL538 �Ƃ����ԊO�������_�C�I�[�h�� PD �̑���ɍ����ւ���Ɣ� 5�Z���`���ł��� �z�g�_�C�I�[�h�Ƃ��Ďg�p�ł��܂��B(3�p���ɐڑ������12�Z���`���̔��ɂȂ�܂�) PIC �̃G���R�[�_�[�E�f�R�[�_�[�����͑o�����荞�݂ŋ쓮���܂����AIR ����̐M���� 1.6uSEC �ƕ����������ߊ��荞�݂ŎĂ����K�̃f�[�^���ǂ������̊m�F���ł��Ȃ� �̂Ńm�C�Y������Ƃ��܂������܂���B ���݂̗����̒Ⴂ�A���v�ł͖�肠��܂����K�� IR���W���[����A���v���g�p���� �ꍇ���̋����m�C�Y����������\��������܂��B�i���Ȃ݂� MAX3131 �Ƃ����� PD �A���v�����̂ݗ��p���� ���� ���Ă݂܂����������� 70 �Z���`�ʍs�������ł����Ђ��� �悤�ȃm�C�Y����������� PIC ���̏��������܂��s���܂���ł����B�j IrDA ���W���[�����g�������������܂����B(�H����IrDA�ԊO���ʐM���W���[��) �H���� IrDA ���W���[���� ����m�F ���܂����B8pin PIC �p��H MAX3131�̃A���v�ł����A���̌�d���̃p�X�R�����������ē��삷��悤�ɂȂ�܂����� ���͂̃m�C�Y���₷�����p�ɂ���ɂ͉�H�S�̂��V�[���h����K�v������܂��B �����I�ɂ͋ߋ����p�Ɗ������TR��̃A���v�ɂ��邩IR���W���[�����ǂ��悤�ł��B (MAX3131�P�̂� RS-232C <-> IrDA �ϊ��� �ł�����m�F�A��70�Z���`�ʂ���܂��B ��H �͎莝���̕��i�ō�����ׁA���i�_���������Ȃ��Ă܂��B�d���͕ʓr�K�v (3.3-5V)) �Ȃ����� �ϊ��� �� RS-232C ����d�����������ׁA�H���� PIC���C�^�[�Ŏg�p���� �ꍇ�̓��C�^�[���� ���� ����K�v������܂��B ���ꂩ�� �}�� ��RS-232C�R�l�N�^�[�� DTE �ɑ��Ă̓N���X�P�[�u���Őڑ�����s���z�u �ɂȂ��Ă��܂��B���Ӌ@�� (PIC���C�^�[) �ɑ��Ă̓X�g���[�g�P�[�u���Őڑ����܂��B pic1 pic2 pic3 circuit rs2ir.hex ���C�^�[�̉��� top |
|
|
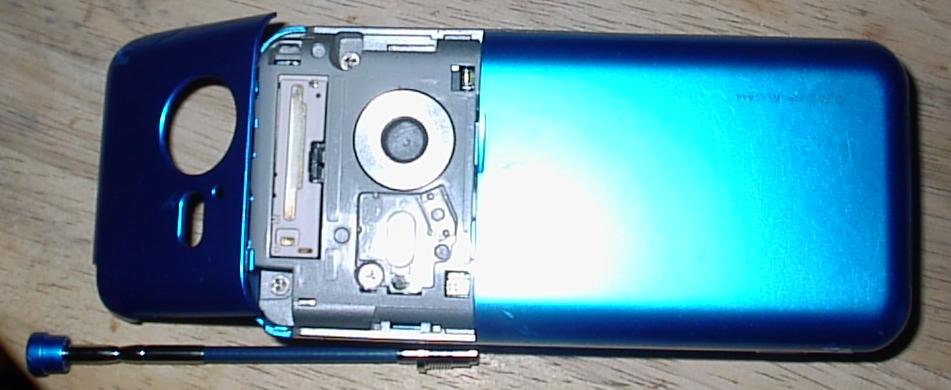
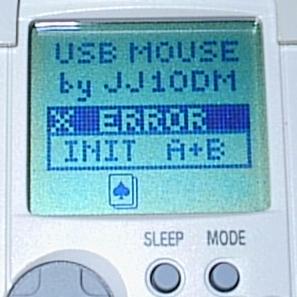
�� JoyPad USB Wheel Mouse for Visual Memory �� JoyPad �^ USB �}�E�X�ɂ��Ă݂܂����B �ʐ^ �ł͉t�����W���[����t���Ă��܂��� �f�o�b�O�ړI�ɕt�������̂Ń}�E�X�ɂ͕K�v����܂���B �v���O�������N��������^�C�g��������o�܂����A�܂� USBN9603 �̏������͍s���܂���B A+B �{�^���������� USBN9603 ���ڑ�����Ă�������������s���}�E�X�Ƃ��ē������܂��B (�����������͓��쒆 USBN9603 �̑��݂��m�F�o���Ȃ��ꍇ�� �G���[��� �ɂȂ�܂��B) ����͂���܂ł� JoyPad �^�z�C�[���@�\�t���}�E�X�Ɠ����ł��B�z�C�[�����[�h�� mode �L�[�őΉ��A�v���O�����̏I���� A + sleep �L�[�ł��B�iA .. ���N���b�N�AB .. �E�N���b�N�j ��������H�Ǝ�قȂ��Ă��Č��̓v�����^�[�|�[�g�������r�W���A��������Reader/Writer �A�_�v�^�[�ł���ɃA�_�v�^�[�I��USB�R���g���[���ƃf�o�b�O�p�̉t�����t���Ă���܂��B ��H �͗�ɂ���� USBN9603 �� SPI �C���^�[�t�F�[�X�Őڑ����Ă��܂��B��H�}�� �_���ň͂܂ꂽ�����̓f�o�b�O�ړI�̉t���p�̉�H�Ń}�E�X�ɂ͕K�v����܂���B �R�l�N�^�[�͉�ꂽ�K���R���g���[�����痬�p���܂����B�@�s���A�T�C���� ���� ���Q�ƁB �i���F ���� 14pin �̃R�l�N�^�� 7pin �Âv���O�ƃ\�P�b�g�̌`������Ă���ׁA���� �R�l�N�^�[���m�h����l�ɂȂ��Ă��܂��B���̂��߃R�l�N�^�ɔԍ���U���Ă��܂��� ��������̂� VM ��̃V���N�ԍ� �𗊂�Ɍ������܂��B�j �o�C�i���|�ڃ_�E�����[�h����ꍇ�͂����� => vmusbwm.vms DreamPassport �̏ꍇ�͂����炩��_�E�����[�h => vmusbwm.vmi pic1 pic2 pic3 pic4 circuit pinouts vmusbwm.vms vmusbwm.vmi top |
|
|
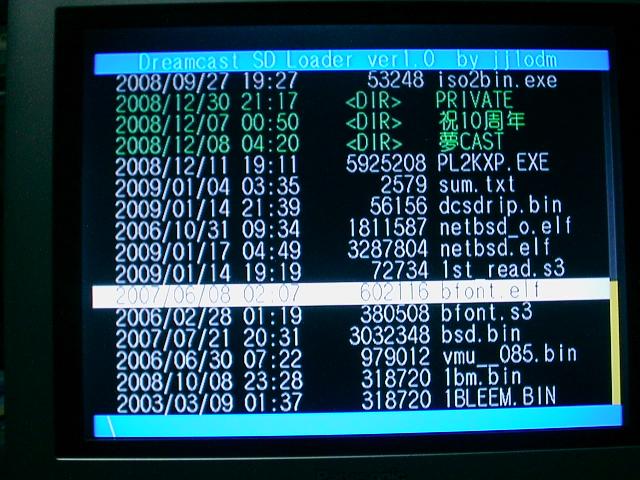
�� JoyPad USB Wheel Mouse for Dreamcast �� USB �}�E�X�ɂ��Ă݂܂����B (�V���[�Y���H�����ł��I) �����͊g���o�X�� CPLD + USBN9603 �̍\�����l���Ă��܂������A�V���A���|�[�g �ׂĂ݂�� RX / TX / RTS / CTS �[�q���P�Ȃ���o�̓|�[�g�Ƃ��Đݒ�ł��� �������������̂ŗ�ɂ���� SPI �C���^�[�t�F�[�X�Őڑ����܂����B�i��H�}�j ����� USB ����̓d���͎g�킸 DC �{�̂��� 3.3V ���������ē��삳���܂��B ���� DC �p�̃V���A���P�[�u���������Ă��炸�A�{�̂�������10pin �����������K���� �悤�ɃR�l�N�^�[�����o���Ă��܂��B�����s�̂̃P�[�u���œd�������Ȃ��ꍇ�� USB �� 5V ���� 3.3V �̃��M�����[�^�[�œ��삳���Ă��ǂ���������܂���B�A�� ���̏ꍇ USB �̃R�l�N�^�[���������邽�т� USBN9603 �̏��������K�v�B ���삳����ɂ��V���A���P�[�u����PC�Ɛڑ����� Serial-Upload ���g���� �v���O���� ��]���E���s���������� USBN9603���ڂ̃P�[�u���Ɍq���ウ�ăR���g���[���[�� START �{�^���������� USBN9603 ������������}�E�X�Ƃ��ē��삵�܂��B ����͂���܂ł̃W���C�p�b�h�^�}�E�X�Ɠ����ŏ\���{�^�����J�[�\���㉺���E A:���{�^�� B:�E�{�^�� Y:�~�b�h�{�^�� X:�z�C�[�����[�h �ɂȂ�܂��B �P�[�u���̌q���ウ���� USBN9603 �̏��������K�v�ȏꍇ�� START + UP �ōď��������o���܂��B�I���� START + Y �Ń��j���[��ʂɖ߂�܂��B �i���F�R���g���[���͏����̕��� DC �̃|�[�gA �Ɍq�����Ă���K�v������܂��B�j �ǐL�F ���� USB�}�E�X�����ۂɎg�����Ƃ����l�͂��Ȃ��Ǝv���܂��� USB Rip ���邢�̓u���b�N�f�o�C�X�Ƃ��� USB GD-ROM �h���C�u���l�����܂��B �ǂȂ������܂��H�iSPI �C���^�[�t�F�[�X���{�g���l�b�N�ɂȂ�܂����j pic1 pic2 pic3 circuit pinouts dcmouse.srec top |
|
|
�� JoyPad USB Wheel Mouse for Dreamcast (G2 BUS) �� JoyPad �^ USB �}�E�X�ł��B �O�� SPI �C���^�[�t�F�[�X�ŃV���A���|�[�g�ɐڑ����܂���������� �����l�����g���o�X�� CPLD + USBN9603 �̍\���ō���Ă݂܂����B �g���o�X�ɂ��Ă� bITmASTER ���̉�H���Q�l�ɂ��܂������A����g���o�X�� �M���Ă��邤���ɂ���������������܂����B���̌��͂܂��ʂ̃y�[�W�ɏ������� �ł����A��Ԃ̃g�s�b�N�̓A�h���X������ 16bit �݂̂ł͂Ȃ���� 16bit ���܂ތv 32bit �̃A�h���X�� ���d�� ����Ă������Ƃł��B ��H �͊g���o�X����� 3.3V �d�����g�p���S�� 3.3V �n�œ��삳���܂��B �g���o�X�� USBN9603 �̃C���^�[�t�F�[�X�ɂ� 3.3V �n�� CPLD �ł��� XC9572 XL-QV44 ���g�p���܂����B�i���[�U�[ I/O �s�� 34pin �S�Ďg�������Ă��܂��j �C���^�[�t�F�[�X�� USBN9603 �� 2 �o�C�g��ԂƊ��荞�݂���݂Ƀ��W�X�^�[�� 1�lj����Čv 3 �o�C�g�̋�Ԃ��A�h���X 0x1400000x �Ƀ}�b�s���O���܂��B �i���ۂɂ� 4 �o�C�g�A���C�����g�̈� 4 �{�̋�Ԃ�����܂��j ���荞�݂́A�g���o�X�� /IRQ �փI�[�v���h���C���Őڑ����Ă��܂�������� USB �}�E�X�̃\�t�g�ł͖��g�p�B�i�X�e�[�^�X���W�X�^�[���� INT ���|�[�����O�j �lj��������W�X�^�� MSB bit7 �����荞���t���O�ŏ����l�̓f�B�Z�[�u�� LSB bit 0 �ɂ� USBN9603 �� INT �[�q�̏�Ԃf�����Ă��܂��B �iUSBN9603 �� INT �[�q�͐��_���ŏ���������Ă��邱�Ƃ�O��ɂ��Ă��܂��j �\�t�g�̕��͑O�������\�t�g�� SPI �C���^�[�t�F�[�X�������g���o�X�p�ɏ��� �����������ł��B�]���đ�����@���O��Ɠ����ł��B �ŐV���ł͊g���o�X�̉�͌��ʂ����ɑ啪�ύX���Ă��܂��B �g���o�X�ɂ��Č����_�ł̉�͌��ʂ��G�c�ɏ����Ă����܂��B �i�M���̃^�C�~���O���ڍׂ͕ʂ̃y�[�W�ɉ��߂ď�������ł��j pic1 pic2 pic3 pic4 pic5 circuit g2usb.jed dcmouse.srec top �ŏI�� (version 3) �ł̓A�N�Z�X�^�C���̐���� GPIO �|�[�g��lj����Ă��܂��B G2 �o�X�� 20pin/22pin �ɂ��A�N�Z�X�^�C��������s���� USBN9603 �̃f�[�^ �o�X�� G2 �o�X�����ɂ��āiCPLD �̒[�q������Ȃ��̂Łj�c���� 6 �{�̒[�q�� GPIO �|�[�g�ɂ��Ă݂܂����B�i�A�N�Z�X�^�C���� 160nSEC �ɐݒ肵�Ă���܂��j ���܂ł� status register �� control register �Ɩ��O��ς� direction bit (6bit) ��lj����� GPIO �|�[�g�̓��o�͐ݒ�Ɏg�p���܂��B(�d���������S�ē��̓|�[�g) �f�o�C�X�͑S�� byte mapping �ɕύX���Ă���̂� byte �P�ʂŃA�N�Z�X���܂��B ���ƃ}�W�b�N�R�[�h�ɂ��f�o�C�X�� enable/disable �@�\��lj����Ă���܂��B related link: about Dreamcast G2 bus pic1 pic2 pic3 circuit g2usb3.v g2usb3.jed dcmouse3.srec top |
|
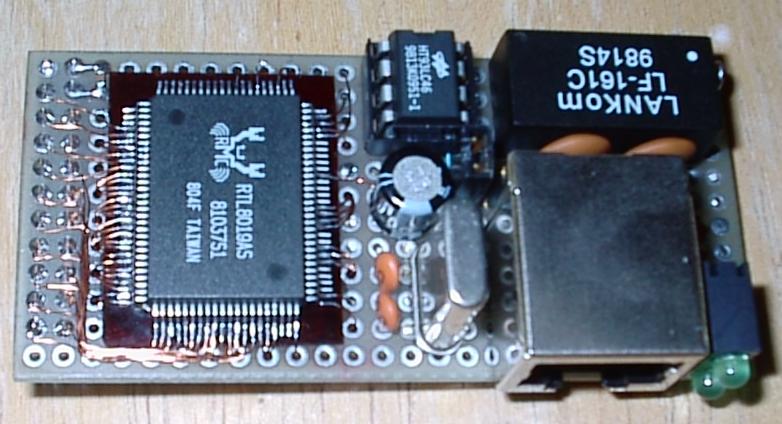
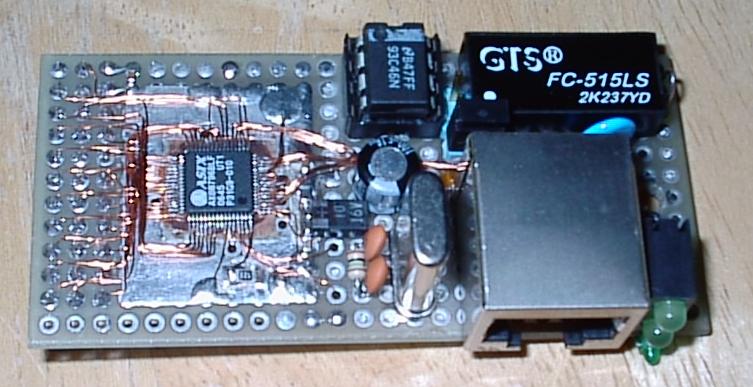
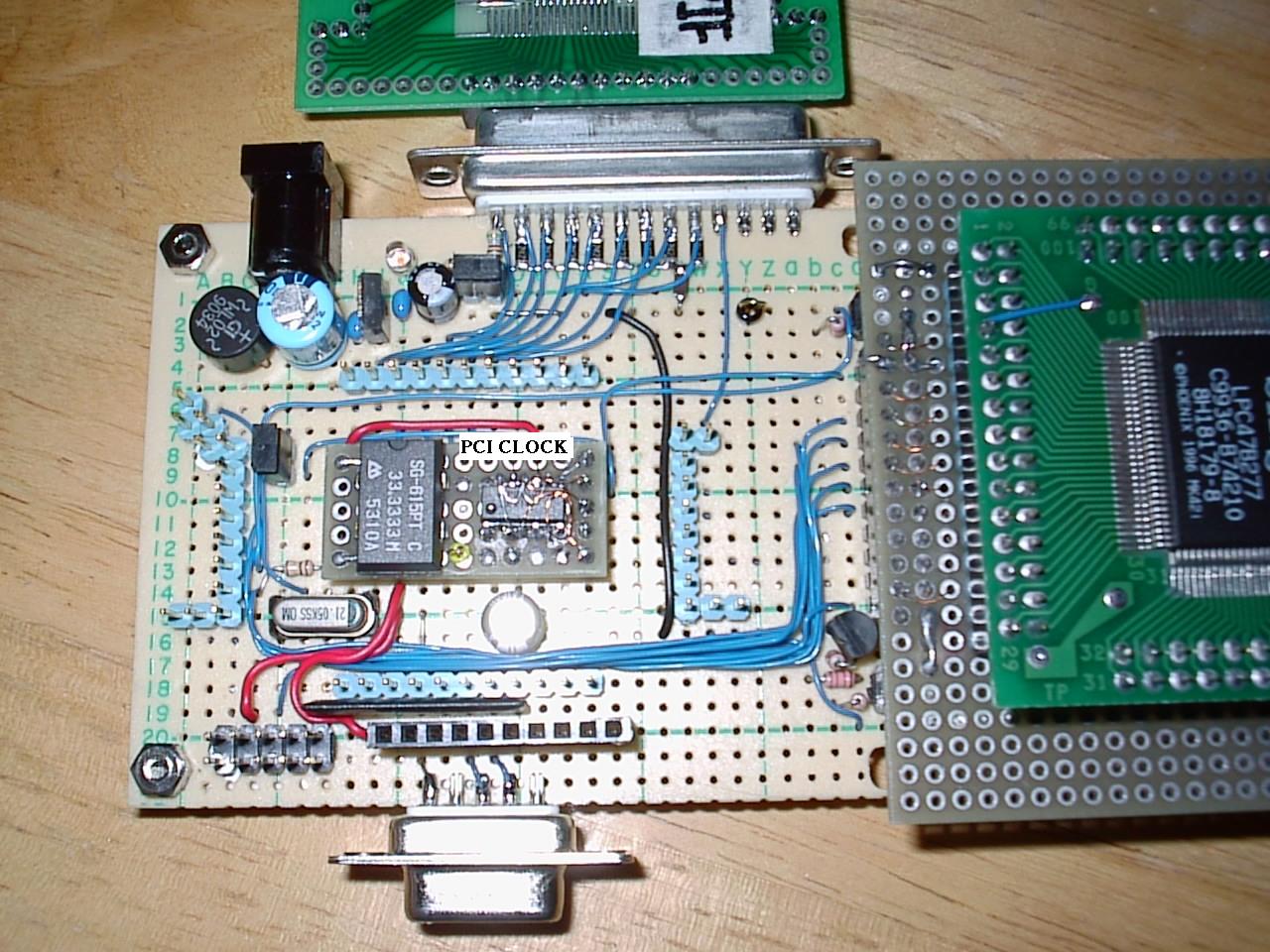
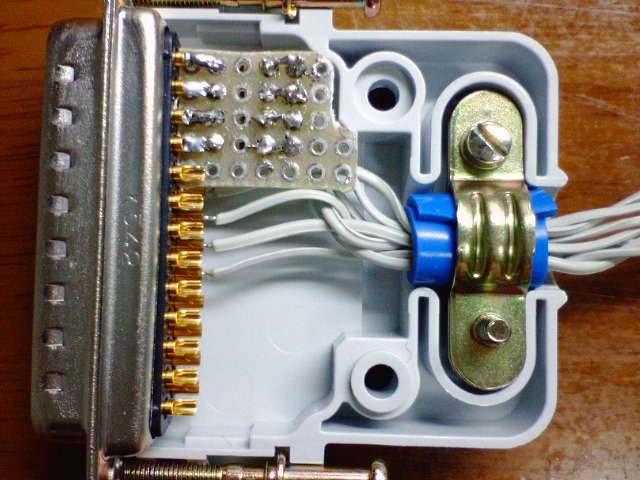
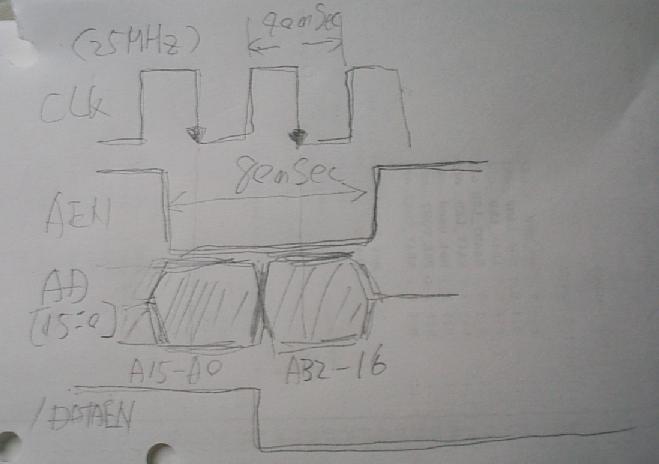
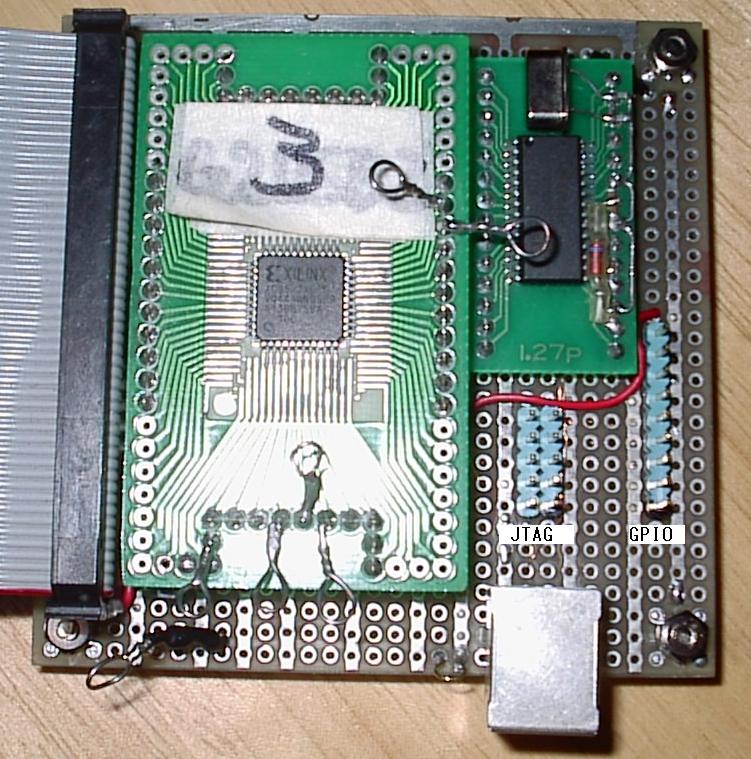
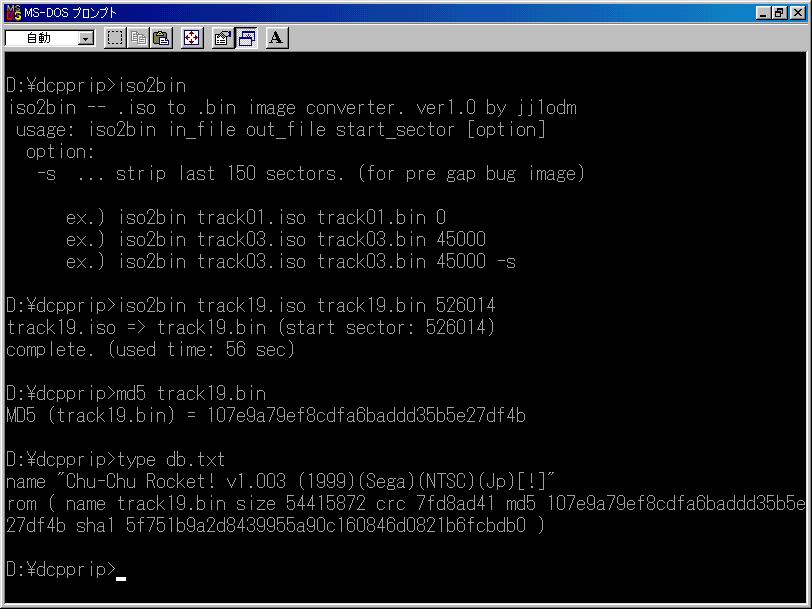
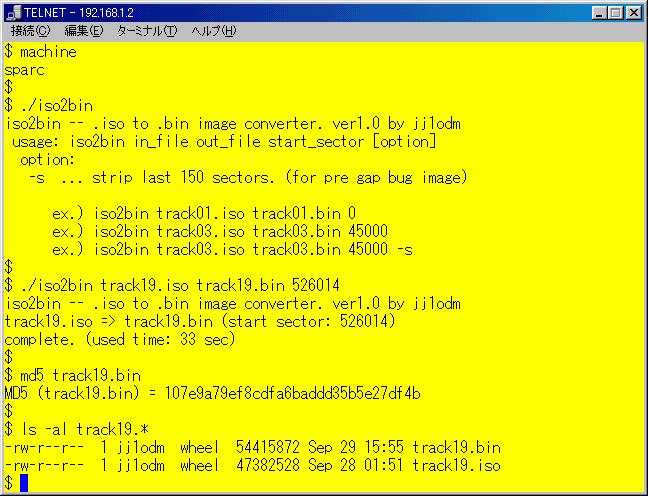
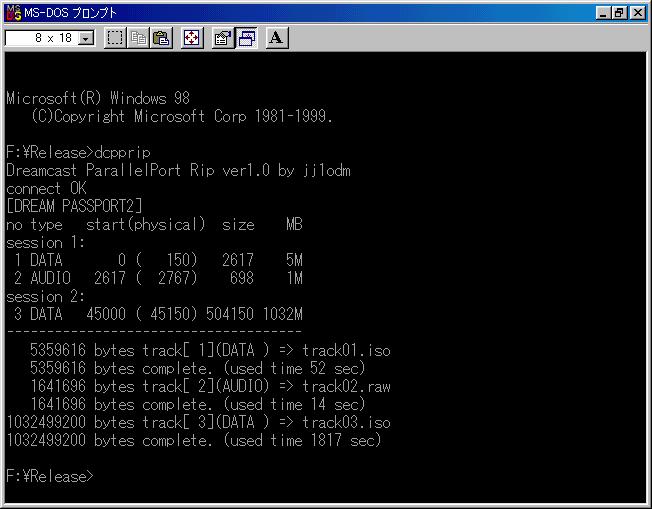
�� Dreamcast Parallel Port Rip (alternative 3) ��
|
|
|
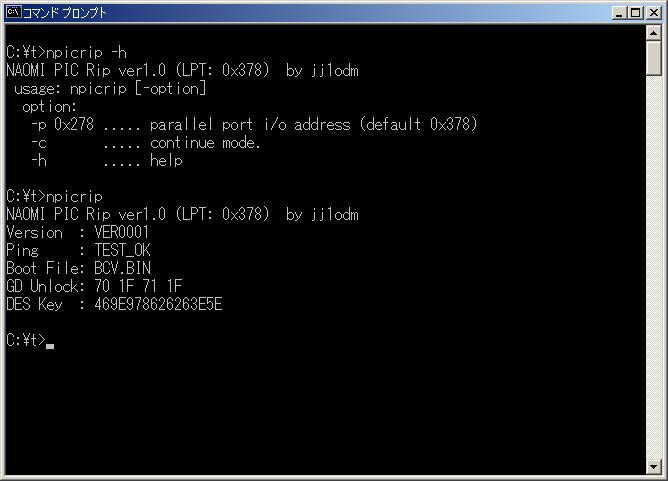
�� NAOMI PIC ParallelPort Rip �� |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}